隨著燙金技術(shù)的發(fā)展和機(jī)械制造技術(shù)的進(jìn)步�,自動(dòng)燙金機(jī)正在逐步取代手?jǐn)[式半自動(dòng)燙金機(jī)��。與手?jǐn)[式半自動(dòng)燙金機(jī)相比�,自動(dòng)燙金機(jī)充分顯示了其高速度��,高效率的特點(diǎn)�。
")
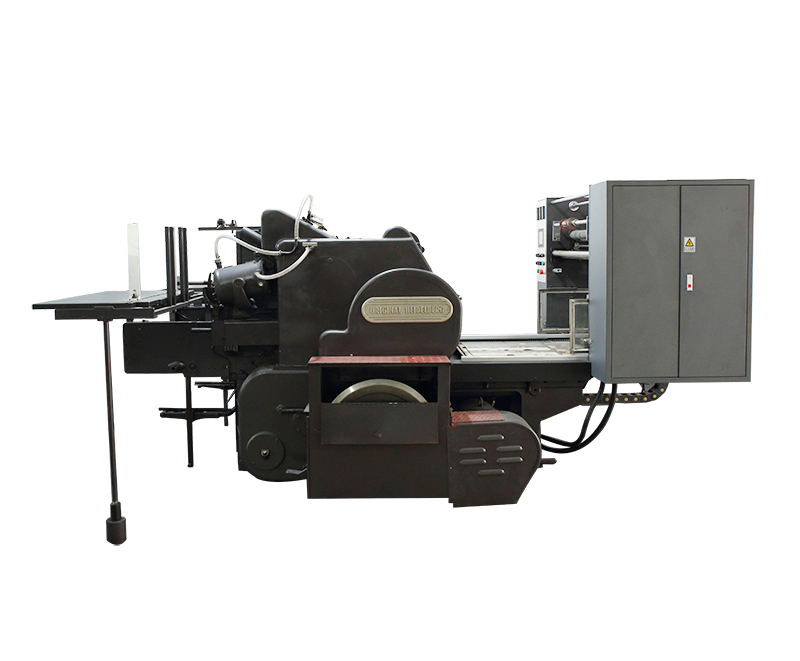
1、進(jìn)步燙金機(jī)的機(jī)械運(yùn)行速度是根本����。自動(dòng)燙金機(jī)一般都是在模切機(jī)的基礎(chǔ)上開(kāi)發(fā)的�����,所以�����,各大廠商的燙金速度一般都受到了模切速度的限制��。920型燙金機(jī)主機(jī)模切速度為每小時(shí)5500張���,為了盡量避免機(jī)器振動(dòng)對(duì)燙金精度的影響���,燙金速度一般控制在4500張以內(nèi)。
為了實(shí)現(xiàn)高精度燙金,必須盡量降低燙金機(jī)運(yùn)行過(guò)程中的振動(dòng)�。機(jī)械振動(dòng)會(huì)直接影響光電檢測(cè)裝置的穩(wěn)定性,直接將誤差引進(jìn)系統(tǒng)�。
2、光電檢測(cè)裝置和光電開(kāi)關(guān)的應(yīng)用��。
光電架在全息燙金的精度控制中扮演這非常重要的角色�。假如光電架不夠穩(wěn)固,機(jī)械振動(dòng)將會(huì)導(dǎo)致光電射出的光斑發(fā)生極其細(xì)微的晃動(dòng)��,當(dāng)光斑從光標(biāo)的邊沿經(jīng)過(guò)期����,檢測(cè)的位置會(huì)產(chǎn)生細(xì)微的變化,這種位置變化直接導(dǎo)致?tīng)C印模塊下金箔位置的定位偏差�。光電檢測(cè)機(jī)構(gòu)的不穩(wěn)固可能導(dǎo)致十幾絲甚至幾十絲的定位偏差。所以�,光電架機(jī)構(gòu)的穩(wěn)定性設(shè)計(jì)顯得至關(guān)重要。
燙金時(shí)光電大約45度對(duì)準(zhǔn)箔面�����。角度對(duì)于感光值的影響是非常敏感的�����。在45度四周,一個(gè)微小的角度變化都可能會(huì)引起感光值的很大變化�����。光電的調(diào)節(jié)以有標(biāo)和無(wú)標(biāo)的感光值之差盡量大為目的����,這樣可以有效增加感光的靈敏度,有利于高精度定位��。
光電間隔金箔表面的間隔對(duì)感光值的影響同樣是非常敏感的����。并不是光電越靠近金箔表面感光越強(qiáng)����,這個(gè)間隔與光電的發(fā)射和接收的特性有關(guān),不同品牌的光電開(kāi)關(guān)需要經(jīng)過(guò)進(jìn)行專門的調(diào)整和試驗(yàn)加以確定����。
3、為了實(shí)現(xiàn)高速控制�,信號(hào)的反映時(shí)間和穩(wěn)定性必須嚴(yán)格控制。
不同廠商的光電開(kāi)關(guān)的反映時(shí)間差異很大�����,有的微妙級(jí)、有的毫秒級(jí)差異很大���。假如光電開(kāi)關(guān)信號(hào)傳輸?shù)竭\(yùn)動(dòng)控制器的過(guò)程中又經(jīng)過(guò)了中間繼電器���,那么損耗的時(shí)間將不可忽視。
4�����、金箔的走箔路徑的設(shè)計(jì)��,對(duì)于定位精度的穩(wěn)定性影響很大���。
弧線走箔路徑設(shè)計(jì)對(duì)于進(jìn)步走箔的穩(wěn)定性有很大幫助����。在燙金機(jī)高速運(yùn)行過(guò)程中�����,伺服電機(jī)的加速過(guò)程非常迅速���,送箔電機(jī)在極短的時(shí)間內(nèi)將金箔送出�����,由于摩擦和慣性的原因�����,張緊裝置不可能立即將金箔張緊�����,在此過(guò)程中必然會(huì)存在一個(gè)金箔由緊變松�����,又迅速?gòu)埦o的過(guò)程��。
5����、燙金程序?qū)鹊目刂啤?/span>
以上部分��,探討了外部因素在高速全息燙金過(guò)程中對(duì)精度的影響����。這些都是精度控制的條件�。
程序在精度控制中的作用是非常關(guān)鍵的����。它終極實(shí)現(xiàn)精度控制。
(1)控制曲線的圓滑型特征����。
控制程序必須實(shí)現(xiàn)伺服電機(jī)在啟動(dòng)和停止過(guò)程中,按照?qǐng)A滑的控制曲線運(yùn)行����,任何定位沖擊都可能導(dǎo)致定位誤差的加大。
(2)速度切換與尋標(biāo)控制����。在全息定位過(guò)程中必須實(shí)現(xiàn)可靠的定位速度的切換。尋標(biāo)長(zhǎng)度之外的金箔進(jìn)給過(guò)程�,必須在保證速度曲線圓滑的基礎(chǔ)上盡量進(jìn)步速度為尋標(biāo)定位過(guò)程爭(zhēng)取時(shí)間,進(jìn)進(jìn)尋標(biāo)長(zhǎng)度后����,將速度穩(wěn)定的降低到光電可以可靠的檢測(cè)到光標(biāo)的速度。這里有兩個(gè)要點(diǎn)�����,第一,轉(zhuǎn)換點(diǎn)必須精確��。第二����,必須在極短的范圍內(nèi)尋得光標(biāo)。由于每個(gè)周期留給全息定位的時(shí)間極短��,低速時(shí)間過(guò)長(zhǎng)會(huì)導(dǎo)致下一個(gè)周期無(wú)法正常進(jìn)行���,造成機(jī)器運(yùn)行的混亂��。
(3)定位補(bǔ)償��。定位補(bǔ)償是一個(gè)應(yīng)用級(jí)的題目����。電化鋁的生產(chǎn)也存在誤差����,導(dǎo)致標(biāo)距從大卷到小卷的過(guò)程中有變化�。另外���,電化鋁由大卷變?yōu)樾【磉^(guò)程,會(huì)在走箔過(guò)程中產(chǎn)生拉伸與張力的變化��。以上原因都需要通過(guò)定位補(bǔ)償來(lái)修正��。定位補(bǔ)償占用低速定位時(shí)間�����。
總之�����,全息燙金過(guò)程看似簡(jiǎn)單���,事實(shí)上����,整個(gè)過(guò)程涉及到紛繁復(fù)雜的細(xì)節(jié)因素�,處理好每個(gè)細(xì)節(jié)才能做出一流的燙金機(jī)。
達(dá)機(jī)器有限公司")







 點(diǎn)擊咨詢
點(diǎn)擊咨詢
 13602540787
13602540787